













CUỘC THI SÁNG TẠO SINH VIÊN KHOA ĐIỆN TỬ 2024 LẦN THỨ 11 với chủ đề CÔNG NGHỆ PHỤC VỤ CUỘC SỐNG ✍Hãy bình chọn sản phẩm được yêu thích nhất - Mã số: #FEE03 - Tên đội thi: K57KDT 💥Mô tả sản phẩm dự thi: “Gậy thông minh dành cho người cao tuổi” 👥Thành viên: 1. Trần Hải Ninh 2. Dương Văn Lập 3. Đặng Văn Hưng 4. Thân Việt Hoàng 5. Tạ Thị Huyền 6. Nông Thị Tiến 7. Nguyễn Hữu Nhận 8. Đặng Quốc Tân 💥Thể lệ cuộc thi: - Điểm sẽ được tính dựa trên số lượt tương tác ----------------------------------- VIDEO SẢN PHẦM DỰ THI https://youtu.be/nM2hX1QVgRQ ---------------------------------- 🔥TUYỂN SINH 2024 KHOA ĐIỆN TỬ🔥 – Kỹ thuật điện tử - 7520207 - Điện tử viễn thông - 7520207 - Kỹ thuật máy tính - 7480106 - Công nghệ Kỹ thuật điều khiển và tự động hóa - 7510303 - Công nghệ điện tử, bán dẫn và vi mạch - 7520207 -------------------------------
Showing posts with label NCKH sinh viên. Show all posts
Showing posts with label NCKH sinh viên. Show all posts
May 24, 2024
Gậy thông minh dành cho người cao tuổi
 5/24/2024 11:32:00 AM
5/24/2024 11:32:00 AM
 asahi
asahi
CUỘC THI SÁNG TẠO SINH VIÊN KHOA ĐIỆN TỬ 2024 LẦN THỨ 11 với chủ đề CÔNG NGHỆ PHỤC VỤ CUỘC SỐNG ✍Hãy bình chọn sản phẩm được yêu thích nhất - Mã số: #FEE03 - Tên đội thi: K57KDT 💥Mô tả sản phẩm dự thi: “Gậy thông minh dành cho người cao tuổi” 👥Thành viên: 1. Trần Hải Ninh 2. Dương Văn Lập 3. Đặng Văn Hưng 4. Thân Việt Hoàng 5. Tạ Thị Huyền 6. Nông Thị Tiến 7. Nguyễn Hữu Nhận 8. Đặng Quốc Tân 💥Thể lệ cuộc thi: - Điểm sẽ được tính dựa trên số lượt tương tác ----------------------------------- VIDEO SẢN PHẦM DỰ THI https://youtu.be/nM2hX1QVgRQ ---------------------------------- 🔥TUYỂN SINH 2024 KHOA ĐIỆN TỬ🔥 – Kỹ thuật điện tử - 7520207 - Điện tử viễn thông - 7520207 - Kỹ thuật máy tính - 7480106 - Công nghệ Kỹ thuật điều khiển và tự động hóa - 7510303 - Công nghệ điện tử, bán dẫn và vi mạch - 7520207 -------------------------------
September 2, 2013
Đề tài khoa học mang tính thực tiễn của sv điều khiển
9/02/2013 08:51:00 AM
asahi
xem chi tiết tại: http://tnut.edu.vn/tin-tuc/khoa-hoc-cong-nghe/1171-khoa-dien-tu-day-manh-cac-de-tai-va-cac-du-an-nghien-cuu-thuc-te
1. Điều khiển thích nghi cho hệ thống quạt gió cánh phẳng
Sinh viên: Nguyễn Thị Tuyết Hoa – Khoa Điện Tử- Lớp K44DDK
Nội dung: Sinh viên đã tiến hành nhận dạng được mô hình thực hệ thống quạt gió cánh phẳng, sau đó sử dụng mô hình đó để thiết kế bộ điều khiển thích nghi nhằm duy trì ổn định góc của cánh phẳng, thuật toán nhận dạng và điều khiển được thực hiện trên Matlab/Simulink theo thời gian thực.
2. Nhận dạng và điều khiển cho hệ thống mức tại phòng thí nghiệm
Sinh viên: Trần Xuân Vịnh - – Khoa Điện Tử- Lớp K44DDK
Nội dung: Sinh viên đã tiến hành nhận dạng được mô hình hệ thống mức, sau đó sử dụng mô hình đó để thiết kế bộ điều khiển PID nhằm duy trì ổn định mức của hệ thống, thuật toán nhận dạng thực hiện bằng Simulinnk, thuật toán điều khiển thực thông qua giao diện đồ họa được viết bằng Visual Basic.
3. Nhận dạng và điều khiển hệ thống gia nhiệt tại phòng thí nghiệm
Sinh viên: Nguyễn Thị Vân – Khoa Điện Tử- Lớp K44DDK
Nội dung: Sinh viên đã tiến hành nhận dạng được mô hình hệ thống gia nhiệt, sau đó sử dụng mô hình đó để thiết kế bộ điều khiển PID nhằm duy trì ổn định nhiệt độ của hệ thống, thuật toán nhận dạng thực hiện bằng Simulinnk, thuật toán điều khiển thực thông qua giao diện đồ họa được viết bằng Visual Basic.
5. Phát triển thuật toán điều khiển mô hình thang máy tải khách 4 tầng tại phòng thí nghiệm
Sinh viên: Hoàng Văn Trọng - Khoa Điện Tử- Lớp K44DDK
Nội dung: Sinh viên thực hiện lắp ráp mô hình thang máy 4 tầng, viết thuật toán điều khiển điều khiển thang máy sau đó cài đặt vào PLC S7200. Thuật toán đã đảm bảo được các thao tác gọi tầng, ưu tiên theo hành trình v.v.
BCN Khoa Điện TửBCN Khoa Điện Tử
August 12, 2012
Autoboard: Quà tặng thầy cô trước lúc ra trường
8/12/2012 12:21:00 AM
asahi
Món quà đem lại niềm vui, bất ngờ cho thầy cô
Ngày 19/05/2012, trong số 38 đề tài báo cáo khoa học của sinh viên Phân ban Cơ học kỹ thuật - Viện cơ khí – Trường ĐH Bách khoa Hà Nội, xuất hiện một đề tài với ý tưởng mới mẻ, độc đáo dành riêng cho các thầy cô mỗi lần đứng trước giảng đường, sản phẩm Bảng đa năng AutoBoard. Đây là thiết bị cơ điện tử được tích hợp chặt chẽ giữa các lĩnh vực cơ khí, điện tử, điều khiển tự động và lập trình, môi trường và vật liệu học, công thái học… nhằm hỗ trợ giảng dạy. Điều vượt trội của AutoBoard chính là được kết hợp một cách chọn lọc các tính năng của bảng viết truyền thống, bảng trắng và màn chiếu. Ngoài chức năng thay thế bảng viết truyền thống AutoBoard có một số tính năng ưu việt như lau bảng tự động. Người dùng sẽ ít bị tác động của bụi phấn do việc lau bảng được chuyển vào hậu kỳ. Mặt bảng được làm bằng hệ thống cuộn nên khi lau bảng sẽ cuộn bảng về mặt sau và kết hợp chổi lau bảng ướt và lau khô đánh mặt bẩn. Khi lau xong hệ thống cuộn sẽ trở về trạng thái hiện hành để tiếp tục bài giảng.
Chức năng lưu trữ thông tin tạm thời cũng là ưu điểm lớn của Autoboard. Mặt bảng ở đây có chiều dài hơn so với mặt bảng bình thường, cho phép cuộn mặt bảng về phía sau. Khi muốn lưu giữ thông tin mình có thể ghi nhớ vị trí vào mạch điều khiển bằng các thiết bị kiểm soát trạng thái như encocder, biến trở,… Khi người dùng đã đi qua phần bảng đấy muốn quay lại vị trí thông tin trước đó chỉ cần dùng chức năng gọi, hệ thống điều khiển sẽ điều khiển các động cơ quay trở lại vị trí đã lưu.
AutoBoard cũng được sử dụng như màn chiếu khi giảng dạy bằng slide, có thể được sử dụng làm bảng viết phấn, bảng viết bút dạ và nó được hỗ trợ ánh áng bởi chức năng sử dụng đèn nền làm tăng khả năng quan sát và hạn chế ảnh hưởng thị lực.....
Đọc thêm tại:
http://automation.net.vn/Sinh-vien-Tuoi-tre/Autoboard-Qua-tang-thay-co-truoc-luc-ra-truong.html
Ngày 19/05/2012, trong số 38 đề tài báo cáo khoa học của sinh viên Phân ban Cơ học kỹ thuật - Viện cơ khí – Trường ĐH Bách khoa Hà Nội, xuất hiện một đề tài với ý tưởng mới mẻ, độc đáo dành riêng cho các thầy cô mỗi lần đứng trước giảng đường, sản phẩm Bảng đa năng AutoBoard. Đây là thiết bị cơ điện tử được tích hợp chặt chẽ giữa các lĩnh vực cơ khí, điện tử, điều khiển tự động và lập trình, môi trường và vật liệu học, công thái học… nhằm hỗ trợ giảng dạy. Điều vượt trội của AutoBoard chính là được kết hợp một cách chọn lọc các tính năng của bảng viết truyền thống, bảng trắng và màn chiếu. Ngoài chức năng thay thế bảng viết truyền thống AutoBoard có một số tính năng ưu việt như lau bảng tự động. Người dùng sẽ ít bị tác động của bụi phấn do việc lau bảng được chuyển vào hậu kỳ. Mặt bảng được làm bằng hệ thống cuộn nên khi lau bảng sẽ cuộn bảng về mặt sau và kết hợp chổi lau bảng ướt và lau khô đánh mặt bẩn. Khi lau xong hệ thống cuộn sẽ trở về trạng thái hiện hành để tiếp tục bài giảng.
Chức năng lưu trữ thông tin tạm thời cũng là ưu điểm lớn của Autoboard. Mặt bảng ở đây có chiều dài hơn so với mặt bảng bình thường, cho phép cuộn mặt bảng về phía sau. Khi muốn lưu giữ thông tin mình có thể ghi nhớ vị trí vào mạch điều khiển bằng các thiết bị kiểm soát trạng thái như encocder, biến trở,… Khi người dùng đã đi qua phần bảng đấy muốn quay lại vị trí thông tin trước đó chỉ cần dùng chức năng gọi, hệ thống điều khiển sẽ điều khiển các động cơ quay trở lại vị trí đã lưu.
AutoBoard cũng được sử dụng như màn chiếu khi giảng dạy bằng slide, có thể được sử dụng làm bảng viết phấn, bảng viết bút dạ và nó được hỗ trợ ánh áng bởi chức năng sử dụng đèn nền làm tăng khả năng quan sát và hạn chế ảnh hưởng thị lực.....
Đọc thêm tại:
http://automation.net.vn/Sinh-vien-Tuoi-tre/Autoboard-Qua-tang-thay-co-truoc-luc-ra-truong.html
October 13, 2011
Phát động phong trào thành lập đội Robocon lớp k44DDK
10/13/2011 09:52:00 PM
asahi
>>Chủ Đề và luật chơi Robocon Hồng Kông 2011
Hôm nay thì nhà trường mới phát động cuộc thi robocon ,Olympic năm 2011 tại hội trường lớn.Theo đó là ra mắt câu lạc bộ Robocon, ....Do thầy Nguyễn Tiến Dũng làm chủ nhiệm ,uỷ viên có thầy Nguyễn Tuấn Anh bên khoa mình ....
Nếu bạn nào lớp mình có niềm đam mê,yêu thích sáng tạo và mong muốn tham gia robocon .Các bạn đăng kí với mình và mình sẽ gửi danh sách lên khoa.
Thông tin thêm :
Robocon trường mình đã có một lần loạt vào chung kết đó là năm 2008:
Năm robocon trường mình loạt vào vong chung kết toàn quốc
Hôm nay thì nhà trường mới phát động cuộc thi robocon ,Olympic năm 2011 tại hội trường lớn.Theo đó là ra mắt câu lạc bộ Robocon, ....Do thầy Nguyễn Tiến Dũng làm chủ nhiệm ,uỷ viên có thầy Nguyễn Tuấn Anh bên khoa mình ....
Nếu bạn nào lớp mình có niềm đam mê,yêu thích sáng tạo và mong muốn tham gia robocon .Các bạn đăng kí với mình và mình sẽ gửi danh sách lên khoa.
Thông tin thêm :
Robocon trường mình đã có một lần loạt vào chung kết đó là năm 2008:
 |
| Đội Robocon năm 2008 |
Năm robocon trường mình loạt vào vong chung kết toàn quốc
Chủ đề và luật chơi robocon Hồng Kông 2012
10/13/2011 09:33:00 PM
asahi
 |
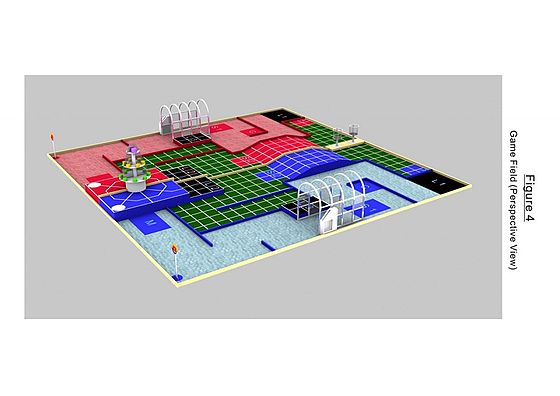
| Biểu trưng của robocon Hồng kông 2012
Chủ Đề: Tiến tới hoà bình và thịnh vượng(in pursuit of peace and prosperity)
|
Địa điểm:TP.Hồng Kông
Luật chơi:
Mỗi đội có 3 robot : Robot bằng tay, Robot tự động, Robot thu thập. Luật thi được dựa trên lễ hội hái bánh bao của người Trung Hoa. Khi bắt đầu trận đấu, robot bằng tay sẽ gắp 1 đồng xu may mắn bỏ vào trong Token Box trước khi đi vào hầm, hoàn thành nhiệm vụ này sẽ được 10 điểm. Sau đó, robot tự động được phép xuất phát, khiêng 1 rổ ở vùng chung và đặt vào bất kỳ vị trí nào của khu vực robot bằng tay, hoàn thành nhiệm vụ được 20 điểm.Đồng thời Robot bằng tay khiêng Robot thu thập và đặt vào Robot tự động, hoàn thành nhiệm vụ được 10 điểm. Có 2 lựa chọn để tiến hành:
Lựa chọn 1:
Robot tự động sẽ khiêng robot thu thập qua cầu, robot bằng tay khiêng rổ đi đến đảo, Robot tự động khiêng robot thu thập tới khu vực cầu thang, robot thu thập sẽ di chuyển lên cầu thang, hoàn thành nhiệm vụ được 30 điểm. Robot bằng tay mang rổ và đặt vào vị trí để rổ trên đảo, hoàn thành nhiệm vụ được 10 điểm. Robot thu thập lấy bánh bao trên tháp bánh bao thả vào rổ, 1 bánh bao ở tầng thấp nhất được 10 điểm, 1 bánh bao ở tầng giữa được 25 điểm. Robot bằng tay khiêng robot thu thập lên tầng cao nhất, lấy bánh bao trên tầng cao nhất và thả vào rổ. Nếu 3 bánh bao được thả chồng lên nhau theo thứ tự bánh bao tầng thấp nhất - bánh bao tầng giữa - bánh bao tầng cao nhất sẽ giành chiến thắng tuyệt đối.
Robot tự động sẽ khiêng robot thu thập qua cầu, robot bằng tay khiêng rổ đi đến đảo, Robot tự động khiêng robot thu thập tới khu vực cầu thang, robot thu thập sẽ di chuyển lên cầu thang, hoàn thành nhiệm vụ được 30 điểm. Robot bằng tay mang rổ và đặt vào vị trí để rổ trên đảo, hoàn thành nhiệm vụ được 10 điểm. Robot thu thập lấy bánh bao trên tháp bánh bao thả vào rổ, 1 bánh bao ở tầng thấp nhất được 10 điểm, 1 bánh bao ở tầng giữa được 25 điểm. Robot bằng tay khiêng robot thu thập lên tầng cao nhất, lấy bánh bao trên tầng cao nhất và thả vào rổ. Nếu 3 bánh bao được thả chồng lên nhau theo thứ tự bánh bao tầng thấp nhất - bánh bao tầng giữa - bánh bao tầng cao nhất sẽ giành chiến thắng tuyệt đối.
Lựa chọn 2:
Robot tự động khiêng 1 rổ, cõng robot thu thập qua cầu đến đảo và đặt rổ tại bất kỳ vị trí nào ở vùng cho robot bằng tay, hoàn thành nhiệm vụ được 20 điểm. Sau đó, robot tự động chạy đến vùng Loading 3 (kế bên đường hầm) và đặt robot thu thập vào đó, hoàn thành nhiệm vụ được 30 điểm. Robot bằng tay khiêng robot thu thập và rổ, chạy đến đảo và đặt robot thu thập lên đảo, đồng thời đặt rổ vào vị trí để rổ trên đảo, hoàn thành nhiệm vụ được 10 điểm. Robot thu thập lấy bánh bao trên tháp bánh bao thả vào rổ, 1 bánh bao ở tầng thấp nhất được 10 điểm, 1 bánh bao ở tầng giữa được 25 điểm. Robot bằng tay khiêng robot thu thập lên tầng cao nhất, lấy bánh bao trên tầng cao nhất và thả vào rổ. Nếu 3 bánh bao được thả chồng lên nhau theo thứ tự bánh bao tầng thấp nhất - bánh bao tầng giữa - bánh bao tầng cao nhất sẽ giành chiến thắng tuyệt đối.
Robot tự động khiêng 1 rổ, cõng robot thu thập qua cầu đến đảo và đặt rổ tại bất kỳ vị trí nào ở vùng cho robot bằng tay, hoàn thành nhiệm vụ được 20 điểm. Sau đó, robot tự động chạy đến vùng Loading 3 (kế bên đường hầm) và đặt robot thu thập vào đó, hoàn thành nhiệm vụ được 30 điểm. Robot bằng tay khiêng robot thu thập và rổ, chạy đến đảo và đặt robot thu thập lên đảo, đồng thời đặt rổ vào vị trí để rổ trên đảo, hoàn thành nhiệm vụ được 10 điểm. Robot thu thập lấy bánh bao trên tháp bánh bao thả vào rổ, 1 bánh bao ở tầng thấp nhất được 10 điểm, 1 bánh bao ở tầng giữa được 25 điểm. Robot bằng tay khiêng robot thu thập lên tầng cao nhất, lấy bánh bao trên tầng cao nhất và thả vào rổ. Nếu 3 bánh bao được thả chồng lên nhau theo thứ tự bánh bao tầng thấp nhất - bánh bao tầng giữa - bánh bao tầng cao nhất sẽ giành chiến thắng tuyệt đối.
Mỗi trận đấu diễn ra trong 180 giây, chiến thắng tuyện đối gọi là "Peng On Dai Gat"
Video chủ đề:
August 12, 2011
Tiết kiệm năng lượng vấn đề ưu tiên trong NCKH của sinh viên
8/12/2011 09:22:00 AM
asahi
Ngày 3/6, tại Trường ĐH Bách Khoa Hà Nội đã diễn ra chương trình tổng kết hoạt động sinh viên nghiên cứu khoa học (NCKH) và thi Olimpic năm học 2010-2011. Trong số các giải thưởng cao được trao cho sinh viên có nhiều sản phẩm hướng đến tiết kiệm năng lượng.
 |
| Đại diện lãnh đạo Trường ĐHBKHN trao phần trưởng cho các tác giả đạt giải Nhất NCKH sinh viên năm học 2010-2011 |
Năm học 2010-2011, Trường ĐH Bách Khoa Hà Nội có 421 công trình của 833 sinh viên tham gia NCKH đều bắt nguồn từ đề tài các cấp và từ nhu cầu của xã hội. Theo tổng kết của Phòng Khoa học - Công nghệ nhà trường thì nhiều đề tài đã tập trung nghiên cứu công nghệ mới, có tính ứng dụng và thực tiễn cao. Có thể nói đây cũng là điểm nổi bật trong phong trào NCKH của sinh viên ĐH Bách Khoa HN so với nhiều trường đại học kỹ thuật khác.
Cũng trong năm học này, sinh viên trường Bách Khoa Hà Nội đã có nhiều thành tích nổi bật trong các phong trào NCKH ngoài nhà trường. Đó là Cúp vô địch Kỳ thi sáng tạo sinh viên Imagine Cup Vietnam 2011 do Hội Tin học Việt Nam cùng Công ty Microsoft Việt Nam đồng tổ chức, đại diện cho Việt Nam tham dự Chung kết Imagine Cup toàn cầu tại Hoa Kỳ vào tháng 8 tới; giải Nhất Cuộc thi Nhân tài Đất Việt 2010 với sản phẩm Hệ thống số hóa tư duy con người; đứng thứ 5 trong cuộc thi chế tạo xe tiết kiệm nhiên liệu do Công ty Honda tổ chức; giải Ba chương trình Triển lãm Robocon Techshow lần thứ 2 trong khuôn khổ Robocon Vietnam 2011 với sản phẩm Xe lăn điện cho người khuyết tật.
Năm học 2010, trường đã có 2 giải Nhất, 4 giải Ba, 7 giải Khuyến khích trong giải thưởng Sinh viên nghiên cứu khoa học cấp Bộ, đạt 1 giải Nhất, 3 giải Ba, 1 giải thưởng VIFOTEC, một giải thưởng của Tổ chức Sở hữu trí tuệ thế giới (WIPO) và đạt 16 giải Nhất cấp quốc gia thi Olympic.
Cũng trong năm học này, sinh viên trường Bách Khoa Hà Nội đã có nhiều thành tích nổi bật trong các phong trào NCKH ngoài nhà trường. Đó là Cúp vô địch Kỳ thi sáng tạo sinh viên Imagine Cup Vietnam 2011 do Hội Tin học Việt Nam cùng Công ty Microsoft Việt Nam đồng tổ chức, đại diện cho Việt Nam tham dự Chung kết Imagine Cup toàn cầu tại Hoa Kỳ vào tháng 8 tới; giải Nhất Cuộc thi Nhân tài Đất Việt 2010 với sản phẩm Hệ thống số hóa tư duy con người; đứng thứ 5 trong cuộc thi chế tạo xe tiết kiệm nhiên liệu do Công ty Honda tổ chức; giải Ba chương trình Triển lãm Robocon Techshow lần thứ 2 trong khuôn khổ Robocon Vietnam 2011 với sản phẩm Xe lăn điện cho người khuyết tật.
Năm học 2010, trường đã có 2 giải Nhất, 4 giải Ba, 7 giải Khuyến khích trong giải thưởng Sinh viên nghiên cứu khoa học cấp Bộ, đạt 1 giải Nhất, 3 giải Ba, 1 giải thưởng VIFOTEC, một giải thưởng của Tổ chức Sở hữu trí tuệ thế giới (WIPO) và đạt 16 giải Nhất cấp quốc gia thi Olympic.
Một số hình ảnh sản phẩm nổi bật, đạt giải cao trong phong trào NCKH của sinh viên năm học 2010-2011.
 |
Sản phẩm Bộ nguồn PFC số - giải Nhất Viện Điện
Sản phẩm được nghiên cứu xuất phát từ yêu cầu cần cải thiện hệ số công suất cũng như giảm thiểu sóng hài cho hệ thống cung cấp điện của nhiều ứng dụng khác nhau như: trong các bộ nguồn viễn thông; trong các UPS online sử dụng các nguồn năng lượng mới; các ổn áp điện từ; các bộ nguồn máy tính; ...
Giải pháp đưa ra cho các ứng dụng này là chế tạo bộ nguồn chỉnh lưu tích cực - bộ nguồn PFC số một pha. Lại Thành Luân, sinh viên K51, lớp Thiết bị điện 1, thành viên nhóm nghiên cứu cho biết: nhóm đã nghiên cứu thành công thuật toán điều khiển và lập trình sử dụng dụng vi xử lý tín hiệu số TMS320F28335. Bộ nguồn với công suất 2kW hiện đã đạt được hệ số công suất 99%, điện áp một chiều đầu ra ổn định 400V khi đầu vào thay đổi từ 90V-250V, hiệu suất đạt trên 95%.
Luân cũng cho biết thêm, được sự ủng hộ và hỗ trợ ban đầu của tập đoàn Viettel và Vinaphone nên nhóm có nhiều thuận lợi trong quá trình nghiên cứu trước đây cũng như định hướng phát triển sản phẩm trong thời gian tới. Sau khi tốt nhiệp đại học, nhóm sẽ hoàn chỉnh bộ PFC đáp ứng đầy đủ các yêu cầu đề ra của một bộ PFC trong các bộ nguồn trong thực tế; nâng cao công suất và cải thiện hiệu suất bằng các phương pháp chuyển mạch mềm; thiết kế tầng DC-DC Full-Bridge để hoàn thiện bộ nguồn viễn thông, sử dụng vi điều khiển có chi phí rẻ hơn để giảm giá thành sản phẩm.
Sản phẩm được nghiên cứu xuất phát từ yêu cầu cần cải thiện hệ số công suất cũng như giảm thiểu sóng hài cho hệ thống cung cấp điện của nhiều ứng dụng khác nhau như: trong các bộ nguồn viễn thông; trong các UPS online sử dụng các nguồn năng lượng mới; các ổn áp điện từ; các bộ nguồn máy tính; ...
Giải pháp đưa ra cho các ứng dụng này là chế tạo bộ nguồn chỉnh lưu tích cực - bộ nguồn PFC số một pha. Lại Thành Luân, sinh viên K51, lớp Thiết bị điện 1, thành viên nhóm nghiên cứu cho biết: nhóm đã nghiên cứu thành công thuật toán điều khiển và lập trình sử dụng dụng vi xử lý tín hiệu số TMS320F28335. Bộ nguồn với công suất 2kW hiện đã đạt được hệ số công suất 99%, điện áp một chiều đầu ra ổn định 400V khi đầu vào thay đổi từ 90V-250V, hiệu suất đạt trên 95%.
Luân cũng cho biết thêm, được sự ủng hộ và hỗ trợ ban đầu của tập đoàn Viettel và Vinaphone nên nhóm có nhiều thuận lợi trong quá trình nghiên cứu trước đây cũng như định hướng phát triển sản phẩm trong thời gian tới. Sau khi tốt nhiệp đại học, nhóm sẽ hoàn chỉnh bộ PFC đáp ứng đầy đủ các yêu cầu đề ra của một bộ PFC trong các bộ nguồn trong thực tế; nâng cao công suất và cải thiện hiệu suất bằng các phương pháp chuyển mạch mềm; thiết kế tầng DC-DC Full-Bridge để hoàn thiện bộ nguồn viễn thông, sử dụng vi điều khiển có chi phí rẻ hơn để giảm giá thành sản phẩm.
 |
| Robot 2 tay điều khiển từ xa DART |
Robot 2 tay điều khiển từ xa DART - giải Nhất Viện Cơ khí
Sinh viên Đinh Công Huy, nhóm trưởng nhóm nghiên cứu Robot 2 tay điều khiển từ xa cho biết, theo ý tưởng, robot DART được điều khiển qua mạng Internet để giúp việc cho gia đình, ví dụ như quan sát an ninh nhà cửa, bật/tắt tivi, bình nóng lạnh, … Robot được mô phỏng theo hoạt động của con người, mỗi cánh tay có 4 bậc tự do. Bàn tay được chế tạo theo hình dạng bàn tay con người với mục đích mở rộng phạm vi ứng dụng cầm/nắm đồ vật. Bộ phận được chế tạo từ 4 bánh omni đa hướng có thể di chuyển linh hoạt trong không gian hẹp và phức tạp. Đặc biệt, robot sẽ ghi nhớ và thực hiện nhiệm vụ một cách tự động khi người sử dụng yêu cầu.
Sinh viên Đinh Công Huy, nhóm trưởng nhóm nghiên cứu Robot 2 tay điều khiển từ xa cho biết, theo ý tưởng, robot DART được điều khiển qua mạng Internet để giúp việc cho gia đình, ví dụ như quan sát an ninh nhà cửa, bật/tắt tivi, bình nóng lạnh, … Robot được mô phỏng theo hoạt động của con người, mỗi cánh tay có 4 bậc tự do. Bàn tay được chế tạo theo hình dạng bàn tay con người với mục đích mở rộng phạm vi ứng dụng cầm/nắm đồ vật. Bộ phận được chế tạo từ 4 bánh omni đa hướng có thể di chuyển linh hoạt trong không gian hẹp và phức tạp. Đặc biệt, robot sẽ ghi nhớ và thực hiện nhiệm vụ một cách tự động khi người sử dụng yêu cầu.
TS. Bùi Văn Hạnh, Phó Viện trưởng Viện Cơ khí, ĐH Bách khoa Hà Nội đánh giá tiềm năng ứng dụng của robot lớn. Ngoài ý tưởng ứng dụng trong gia đình, robot này còn có thể ứng dụng vào những việc có độ tinh xảo cao như trong y tế. Với robot có số bậc tự do lớn như DART, TS. Hạnh cũng đánh giá cao mức độ hoàn thiện robot về mặt cơ khí lẫn giải thuật điều khiển.
Sản phẩm Hệ điều khiển định hướng pin mặt trời
Sản phẩm xuất phát từ nhu cầu sử dụng nguồn năng lượng mới – năng lượng mặt trời và khắc phục nhược điểm của cách khai thác nguồn năng lượng này trong thời gian qua. Nhược điểm đó là việc hệ thống pin mặt trời thường được lắp cố định, do đó pin chỉ đạt hiệu suất lớn nhất khi ánh sáng mặt trời vuông góc với mặt phẳng của tấm pin. Để khai thác được năng lượng trong điều kiện đó, người ta cần một hệ thống cảm biến xác định hướng chiếu của ánh sáng mặt trời, từ đó điều khiển cho mặt phẳng của tấm pin hướng vuông góc với ánh sáng mặt trời. Tuy nhiên, giải pháp này bị ảnh hưởng mạnh bởi nhiễu và trong khoảng thời gian không có mặt trời thì hệ thống này gần như không hoạt động. Sinh viên Đỗ Văn Sơn, lớp Cơ điện tử 4-K51, Viện Cơ khí, thành viên nhóm nghiên cứu cho biết đây cũng là lý do để nhóm đưa ra hướng mới trong nghiên cứu: tự động hóa quá trình điều khiển định hướng hệ thống pin mặt trời đạt hiệu suất cao nhất, thu được nhiều năng lượng sạch từ mặt trời. Giải pháp cụ thể là xử lý ảnh bằng phần mềm Matlab, điều khiển tấm pin luôn hướng theo hướng chiếu của mặt trời. Giải pháp này có thể nâng cao hiệu suất lên 30% so với đặt tấm pin cố định.
Sản phẩm xuất phát từ nhu cầu sử dụng nguồn năng lượng mới – năng lượng mặt trời và khắc phục nhược điểm của cách khai thác nguồn năng lượng này trong thời gian qua. Nhược điểm đó là việc hệ thống pin mặt trời thường được lắp cố định, do đó pin chỉ đạt hiệu suất lớn nhất khi ánh sáng mặt trời vuông góc với mặt phẳng của tấm pin. Để khai thác được năng lượng trong điều kiện đó, người ta cần một hệ thống cảm biến xác định hướng chiếu của ánh sáng mặt trời, từ đó điều khiển cho mặt phẳng của tấm pin hướng vuông góc với ánh sáng mặt trời. Tuy nhiên, giải pháp này bị ảnh hưởng mạnh bởi nhiễu và trong khoảng thời gian không có mặt trời thì hệ thống này gần như không hoạt động. Sinh viên Đỗ Văn Sơn, lớp Cơ điện tử 4-K51, Viện Cơ khí, thành viên nhóm nghiên cứu cho biết đây cũng là lý do để nhóm đưa ra hướng mới trong nghiên cứu: tự động hóa quá trình điều khiển định hướng hệ thống pin mặt trời đạt hiệu suất cao nhất, thu được nhiều năng lượng sạch từ mặt trời. Giải pháp cụ thể là xử lý ảnh bằng phần mềm Matlab, điều khiển tấm pin luôn hướng theo hướng chiếu của mặt trời. Giải pháp này có thể nâng cao hiệu suất lên 30% so với đặt tấm pin cố định.
 |
| Hệ điều khiển định hướng pin mặt trời |






